|
ĀûÓÃA-GPSĢŽ―ÓĘÕÆũēŧąØÔŲÏÂÔØšÍ―âīaĀīŨÔGPSÎĀÐĮĩÄĩžš―ĘýūÝĢŽŌōīËŋÉŌÔÓÐļüķāĩÄĘąžäšÍīĶĀíÄÜÁĶĀīŨ·ŨŲGPSŅķšÅĢŽÕâŅųÄÜ―ĩĩÍĘŨīÎķĻÎŧĘąžäĢŽÔöžÓÁéÃôķČŌÔž°ūßÓÐŨîīóĩÄŋÉÓÃÐÔĄĢ
GPSĘĮŌŧÖÖŧųÓÚÎĀÐĮĩÄķĻÎŧÏĩÍģĢŽËüŨîģõÓÉÃĀđúūü·―ÉčžÆēĒĘÜÃĀđúūü·―ĩÄŋØÖÆĢŽŋÉŌÔΊČΚÎČËÃâ·ŅĘđÓÃĄĢÕâļöÏĩÍģĘĮÓÉÔÚ6ļöŧ·ČÆÔÚŧ·ÐÎđėĩĀÉÏĩÄ24ŋÅÎĀÐĮŨéģÉĢŽŌŧļöÎĀÐĮŧ·ČÆđėĩĀÔËŨŠŌŧÖÜĩÄĘąžä―Ó―ü12ļöÐĄĘąĄĢÃŋļöÎĀÐĮēŧķÏĩØ·ĒËÍđØÓÚÄŋĮ°ĘąžäĄĒËųÓÐÎĀÐĮĩÄÎŧÖÃŌÔž°ÏņÄęĀú(almanac)šÍÐĮĀú(ephemeris)ĩČÏāđØĘýūÝŅķÏĒĄĢGPS―ÓĘÕÆũĘđÓÃÕâÖÖŅķÏĒĀīÔËËãÆäŨÔÉíÓëÎĀÐĮÖŪžäĩÄūāĀëĄĢΊȷķĻÎŧÖÃĢŽGPS―ÓĘÕÆũąØÐë―ÓĘÕĀīŨÔÖÁÉŲČýļöÎĀÐĮĩÄŅķšÅĄĢ
ĘŨīÎķĻÎŧĘąžä(TTFF)šÜīóģĖķČÉÏūöķĻÓÚ―ÓĘÕÆũĩÄ―ÓĘÕÁéÃôķČĢŽŌÔž°ŋÉžûÎĀÐĮĩÄĘýÁŋĄĒÃŋļöÎĀÐĮŅķšÅĩÄĮŋķČĄĒÎĀÐĮÔÚĖėŋÕÖÐĩÄ·ÖēžŌÔž°―ÓĘÕÆũķÔĖėŋÕĩÄĘÓ―ĮĄĢÔÚŌŧÖÖēŧĀûĩÄŧ·ūģÖÐĢŽČįŅķšÅ―ÏČõĩÄģĮĘÐļßÂĨžäÏķŧōÕßĘŌÄÚĢŽÄģÐĐĮéŋöÏÂÐčŌŠžļ·ÖÖÓĩÄĘąžäĀīÔËËãÎŧÖÃĄĢÕâķÔÓÚąūĩØ·þÎņ(LBS)ŧōÕß―ôžąšô―Ð(E911)ĀīËĩĘĮēŧŋÉ―ÓĘÜĩÄĢŽÕâÐĐĮéŋöÐčŌŠŌŧÖÖļüŋėĩÄŧņČĄĘąžäĄĢΊīËĢŽČËÃĮŋŠ·ĒÁËļĻÖúÐÍGPS(A-GPS)Āī―âūöēŧĀûŧ·ūģÏÂĩÄTTFFÎĘĖâĄĢ
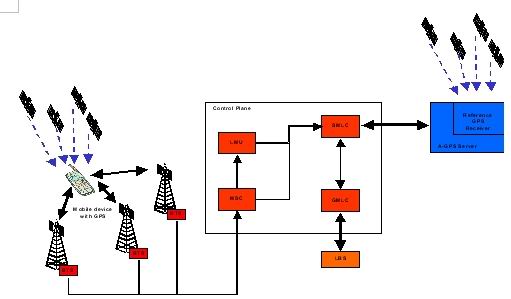
Íž1ĢšŋØÖÆēãÃæÉÏĩÄA-GPSĄĢ
A-GPS
A-GPSĩÄŋŠ·Ēēŋ·ÝĩØĘÜĩ―ÃĀđúÁŠ°îÍĻŅķÎŊÔąŧá(FCC)ĩÄE911ĮŋÖÆŌŠĮóÄÜķÔ―ôžąšô―ÐÕßĖáđĐÐÐķŊĩįŧ°ĩÄķĻÎŧËųÍÆķŊĄĢA-GPSĩÄÄŋĩÄĘĮŧōÕßĖáļßTTFFĢŽŧōÕßĩąËüēŧÄÜĖáļßTTFFĘąĘĩÏÖķĻÎŧÔËËãĄĢ
đýČĨžļÄęĢŽÔÚA-GPSÕâļöđØžüīĘÖŪÏÂŋŠ·ĒģöÁËēŧÍŽĩÄļÅÄîšÍ―âūö·―°ļĢŽÆäÖКÜķāĘĮĘÜŨĻĀûąĢŧĪĩÄĄĢÕâÐĐēŧÍŽĩÄļÅÄîŋÉŌÔ·ÖģÉÖ§ģÖÐÍGPS(aided GPS)šÍļĻÖúÐÍGPSÁ―Āā(assisted GPS)ĄĢ
1. Ö§ÔŪÐÍGPS
Ö§ģÖÐÍGPSÍļđýÔÚÐÐķŊÍøÂįÉÏ·ĒËÍÄęĀúĄĒÐĮĀúĄĒīÖÂÔĩÄÎŧÖÚÍĘąžäĀīĖáļßTTFFĄĢÕâÖÖÖ§ģÖÐÍĘýūÝŋÉŌÔÔÚŋØÖÆēãÃæ(control plane)ÉÏ·ĒËÍĢŽŧōÕßÐÐķŊÍøÂįĩÄÓÃŧ§ēãÃæ(user plane)ÉÏĄĢÎŧÖÃĩÄÔËËãīóķā·ĒÉúÔÚÐÐķŊÉčąļÉÏĄĢ
2. ļĻÖúÐÍGPS
ļĻÖúÐÍGPSĘđĩÃēÉÓÃŋėËŲTTFFÔËËãÎŧÖÃģÉΊŋÉÄÜĄĢΊĘĩÏÖÕâĩãĢŽĀûÓÃÏņĘąžäÍŽē―ĄĒļüŨžČ·ĩÄÎŧÖÃĄĒķžē·ĀÕšÍÆĩÂĘÕâŅųĩÄķîÍâŅķÏĒÓÃĀīČ·ķĻÎŧÖÃĄĢÕâÖÖķîÍâŅķÏĒŋÉŌÔÍļđýĘđÓÃÐÐķŊÍøÂįŋØÖÆēãÃæĩÄŧųīĄÉčąļĀīŧņĩÃĢŽÏņÏČ―øĮ°ÏōÁī·ČýąßēâÁŋ(AFLT)ŧúÖÆŋÉÓÃĀīČ·ķĻÐÐķŊÉčąļĩÄÎŧÖÃĄĢÕâĀïĢŽŅķšÅīÓÐÐķŊÉčąļ·ĒģöĢŽžļļöÐÐķŊŧųĩØĖĻ―ÓĘÕēĒ―øÐÐēâÁŋĄĢÎŧÖÃĩÄÔËËãŋÉŌÔÔÚÐÐķŊÉčąļÄÚ·ĒÉú(ŧųÓÚÐÐķŊÉčąļĩÄ)ĢŽŧōÕßÔÚÐÐķŊÍøÂį·þÎņÆũÉÏ(ŧųÓÚÍøÂįĩÄ)ĄĢ
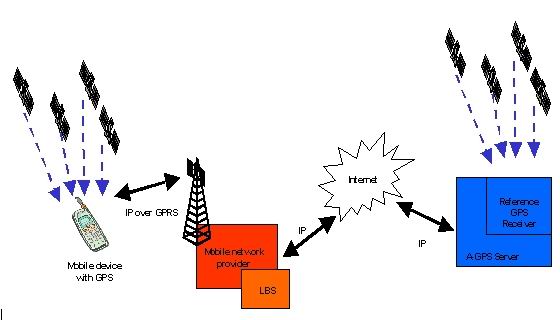
Íž2ĢšÓÃŧ§ēãÃæÉÏĩÄA-GPSĄĢ
ŧųÓÚÐÐķŊÉčąļĩÄļĻÖúÐÍGPS―âūö·―°ļÍļđýÐÐķŊÍøÂį―ÓĘÕķîÍâĩÄļĻÖúGPSĘýūÝĢŽĩŦĘĮÔÚÐÐķŊÉčąļÉÏ―øÐÐÎŧÖÃÔËËãĄĢÕâŌâÎķŨÅLBSŧōÕßE911·þÎņąØÐëīÓÐÐķŊÉčąļĩÃĩ―ÄŋĮ°ĩÄÎŧÖÃĄĢ
ēÉÓÃŧųÓÚÍøÂįĩÄļĻÖúÐÍGPS―âūö·―°ļĢŽÐÐķŊÉčąļ·ĒËÍÔĘžĩÄGPSĘýūÝĩ―ÐÐķŊÍøÂįÖÐĩÄGPSļĻÖú·þÎņÆũĄĢÕâļöÍøÂį·þÎņÆũŋÉŌÔĀûÓÃÖą―ÓĀīŨÔÍøÂįĩÄķîÍâļĻÖúGPSŅķÏĒĀīÔËËãÎŧÖÃĄĢÔÚÔËËãÖŪšóĢŽÎŧÖÃĘýūÝąŧ·ĒËÍĩ――ÓĘÕÆũĄĢLBSŧōÕßE911·þÎņŋÉŌÔÖą―ÓīæČĄÍøÂį·þÎņÆũĩÄÎŧÖÃĘýūÝŋâĄĢ
A-GPSĩÄšÃīĶĘĮļÄÉÆTTFFĄĒÔöžÓÁéÃôÐÔŌÔž°ĘđŋÉÓÃÐÔŨîīóŧŊĢŽÕâÐĐÓÅĩãČÃ―ÓĘÕÆũēŧÔŲąØÐëÏÂÔØšÍŌëÂëĀīŨÔGPSÎĀÐĮĩÄĩžš―ĘýūÝĢŽ―ÓĘÕÆũŋÉŌÔĘđÓÃļüķāĩÄĘąžäšÍīĶĀíÄÜÁĶĀīŨ·ŨŲGPSŅķšÅĄĢ
ŧųÓÚŋØÖÆēãÃæĩÄA-GPS
ŋØÖÆēãÃæ·―°ļĀûÓÃÎÞÏßÍøÂįĩÄđĶÄÜŌÔž°ŅķšÅ·ĒËÍēãĀīīÓÍøÂįŧņČĄÎŧÖÃŅķÏĒĢŽČį·äģēĘ―IDĄĒAFLTŧōÕßĘąžäÍŽē―ŧúÖÆĄĢ
CDMAšÍGSMĩÄ·äģēĘ―ÉČĮøķžÕëķÔŋØÖÆēãÃæA-GPSÏûÏĒ·ĒËÍŋŠ·ĒģöÁËąęŨž(·ÖąðΊTIA/IS-801-1šÍ3GPP TS25.331)ĢŽķĻŌåÁËÓÃŧ§ÉčąļÐÔÄÜšâÁŋąęŨž(·ÖąðΊTIA 916šÍ3GPP TS 25.171)ĄĢÕâÐĐąęŨžÃčĘöÁËĀīŨÔÎÞÏßÍøÂįĩÄÎŧÖÃŅķÏĒČįšÎŧņČĄĢŽŌÔž°ÕâļöŅķÏĒČįšÎÓÃÓÚA-GPSĄĢ
ĩąÔÚŋØÖÆēãÃæÉÏĘđÓÃA-GPSĘąĢŽķĻÎŧēâÁŋĩĨÔŠĀûÓÃÔÚÐÐķŊÉčąļĄĒžļļöĘÕ·ĒÆũŧųĩØĖĻšÍÐÐķŊ―ŧŧŧÖÐÐÄÖŪžäĩÄēâÁŋŅķšÅīŦĘäĀīŧņĩÃÎŧÖÃŅķÏĒĄĢ·þÎņÐÐķŊķĻÎŧÖÐÐÄĘÕžŊÕâÐĐŧųÓÚÍøÂįĩÄÎŧÖÃĘýūÝŌÔž°ĀīŨÔūßÓОļļöēÎŋžGPS―ÓĘÕÆũĩÄA-GPS·þÎņÆũĩÄĘýūÝĢŽ―ŦÕâÖÖļĻÖúĘýūÝ·ĒËÍĩ―ÐÐķŊÉčąļĢŽĘđÐÐķŊÉčąļÄÜÔËËãģöŨžČ·ĩÄÎŧÖÃĄĢLBSŋÉŌÔÍļđýÍøÂįÍøđØÐÐķŊķĻÎŧÖÐÐÄĀīŧņČĄÕâļöÎŧÖÃĘýūÝĄĢ
ēÉÓÃŋØÖÆēãÃæ·―·ĻĢŽŧųÓÚÍøÂįŧōÕßŧųÓÚÐÐķŊÉčąļÏĩÍģĩÄÎŧÖÃÔËËãĘĮŋÉÄÜĩÄĄĢŧųÓÚŋØÖÆēãÃæĩÄA-GPSÏĩÍģ°ēŨ°·ĮģĢļīÔÓķøģÉąūšÜļßĢŽŌōΊÐčŌŠšÜķāķîÍâĩÄÓēžþĀīīĶĀíļīÔÓĩÄÐŌéĢŽĩŦĘĮÕâŅųĩÄA-GPSÏĩÍģ―ŦūßÓÐÎŧÖÃÔËËãĩÄīóēŋ·ÝšÃīĶĄĢ
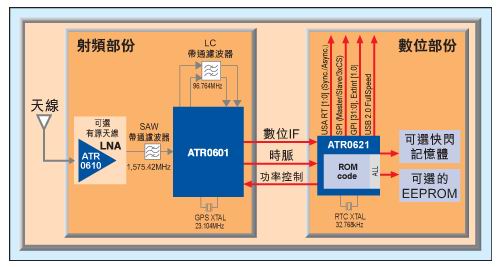
Íž3ĢšANTARIS 4―áđđÍžĄĢ
ŧųÓÚÓÃŧ§ēãÃæĩÄA-GPS
ÓÃŧ§ēãÃæ·―°ļĘĮŌŧÖÖÔÚA-GPS·þÎņÆũšÍÐÐķŊÉčąļÖŪžäĩÄÍĻŅķķžŧųÓÚČŦIPĘýūÝÁī―ÓĩÄA-GPSÏĩÍģĢŽÓëÎÞÏßŅķšÅēãÎÞđØ(ŧųÓÚGPRSĩÄIP)ĄĢÏāđØąęŨžÓÉŋŠ·ÅĘ―ÐÐķŊÁŠÃË(OMA)ÖÆķĐĢŽģÆΊ°ēČŦÓÃŧ§ēãÃæķĻÎŧ(SUPL)ĄĢ
ĩąÔÚÓÃŧ§ēãÃæÉÏĘđÓÃA-GPSĘąĢŽīøGPS―ÓĘÕÆũĩÄÐÐķŊÉčąļÔÚÐÐķŊÍøÂįĩÄÓÃŧ§ēãÃæÉÏÍļđýIPÓëA-GPSÁŽ―ÓĄĢA-GPS·þÎņÆũīÓžļļöēÎŋžGPS―ÓĘÕÆũĘÕžŊÖ§ģÖĘýūÝĢŽČįÐĮĀúÓëÄęĀúĄĢ·þÎņÆũļųūÝŌŠĮó·ĒËÍÕâļöĘýūÝĩ―ÐÐķŊÉčąļĄĢÐÐķŊÉčąļĩÄGPS―ÓĘÕÆũĀûÓÃÕâļöÖ§ģÖĘýūÝĀī―øÐÐÎŧÖÃÔËËãĄĢ
LBSŋÉŌÔŌŠĮóÐÐķŊÉčąļĖáđĐÎŧÖÃŅķÏĒĢŽÕâÐĐĘýūÝ―ŦÍļđýIPÁŽ―Ó·ĒËÍĄĢÕâÖÖ·―·ĻąČÍļđýŋØÖÆēãÃæĩÄ·―·ĻģÉąūĩÍĢŽŌōΊÐÐķŊÍøÂįđĐŧõÉĖķÔŋØÖÆÃæēŧÐčŌŠĖØąðĩÄÓēžþĢŽķøĮŌÕâÖÖ·―·ĻķÔÓÚËųÓÐĩÄÐÐķŊąęŨžķžĘĮŋÉŌÔĘđÓÃĩÄĄĢ
GPSÐūÆŽŨéANTARIS 4
ŌÔAtmelĩÄGPSÐūÆŽŨéANTARIS 4ΊĀýĢŽļÃŨéžþĘĮÓëu-bloxđŦËūđēÍŽŋŠ·ĒĢŽÄÚšŽÉäÆĩ―ÓĘÕÆũIC ATR0601ĄĒLNA ATR0610šÍŧųÆĩIC ATR0621ĢŽÓÉAtmelĖáđĐRFÐūÆŽ/ĘýŨÖICžžĘõĢŽu-bloxĖáđĐGPSČížþžžĘõĄĢ
ļßÔöŌæĩÍÔëŌô·ÅīóÆũ(LNA)ĘđÓÃÁËAtmelĩÄSiGežžĘõÉčžÆÓÃÓÚGPSÓĶÓÃĢŽūßÓÐ1.6dBĩÄÔëŌôÏĩĘýĄĒļßÔöŌæ(>16dB)ĄĒĩÍđĶÂĘÉčžÆ(<10mW)ĩÄĖØĩãĢŽŌÔž°ÕûšÏĩÄÉÏĩįŋØÖÆšÍ50ΩĩÄĘäģöÆĨÅäĄĢ
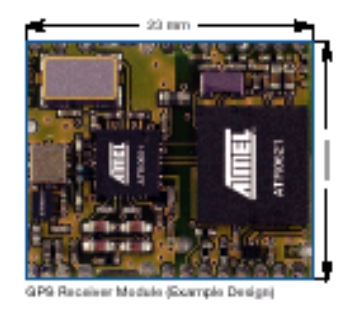
Íž4ĢšGPS―ÓĘÕÆũÄĢŋéĄĢ
GPS RF―ÓĘÕÆũICūßÓÐÓÅÁžĩÄRFÐÔÄÜšÍÐĄÓÚ6.8dBĩÄÔëŌôÏĩĘýĢŽķÔļÉČÅēŧÃôļÐĢŽđĶšÄÐĄÓÚ40mWĄĢËü°üĀĻŌŧļöÆĩÂĘšÏģÉÆũĄĒīøŨÔķŊÔöŌæŋØÖÆ(AGC)ĩÄÖÐÆĩ·ÅīóÆũšÍ1.5ÎŧĩÄA/DŨŠŨŠÆũĢŽēÉÓÃÁËBiCMOSÖÆģĖÖÆÔėĢŽ―ÓĘÕÆũÖ§ģÖXTOšÍTXCOĄĢÍâēŋąØÐëĘđÓÃŌŧļöSAWīøÍĻÂËēĻÆũšÍŌŧļö·ÖĀëĩÄIFÂËēĻÆũ(96.764MHz)ÁŽ―Óĩ―RF―ÓĘÕÆũĄĢ
GPSŧųÆĩīĶĀíÆũATR0621°üĀĻŌŧļö16ÍĻĩĀGPSÏāđØÆũĢŽļÃŧųÆĩīĶĀíÆũēÉÓÃARM7TDMIīĶĀíÆũšËÐÄĢŽūßÓÐ128kBÄÚēŋSRAMšÍ384kBÄÚēŋROMĢŽÔÚÕâļöROMÖаüĀĻČŦēŋĩÄGPSČÍĖåĢŽÓÉu-bloxđŦËūĘÚČĻĢŽÓÃĀīÖīÐÐŧųąūĩÄGPSīĶĀíĢŽ°üĀĻŨ·ŨŲĄĒŧņČĄĄĒĩžš―šÍķĻÎŧĘýūÝĘäģöĄĢķÔÆÕÍĻĩÄPVT(ÎŧÖÃ/ËŲķČ/Ęąžä)ÓĶÓÃĢŽēŧÐčŌŠÍâēŋÉÁīæŧōROMĄĢČÍĖåÖ§ģÖÔÚŋÉŅĄĩÄÍâēŋEEPROMÖÐīĒīæŋÉÄÜĩÄÅäÖÃÉčÖÃĢŽķÔÓÚĖØķĻĩÄÓÃŧ§ÓĶÓÃĖáđĐŌŧĖŨČížþŋŠ·ĒĖŨžþĄĢŧųÆĩūßÓÐēŧÍŽĩÄ―ÓŋÚŌÔ·―ąãÁéŧîĩÄÏĩÍģÕûšÏ(2ļöUSARTĄĒUSB 2.0ĄĒSPIĄĒGPIO)ĢŽķøĮŌÍļđýēŧÍŽĩÄĘĄĩįÄĢĘ―ĖáđĐÏČ―øĩÄđĶÂĘđÜĀíĄĢ
ĩžš―ĩÄ―áđûÍļđýUSARTŧōÕßUSB―ÓŋÚĘäģöĢŽĘđÓÃÄÚēŋNMEA(0183)ÐŌéŧōÕßu-bloxđŦËūĩÄÐŌéĢŽšóÕßūßÓÐÔöĮŋĩÄĩžš―ŅķÏĒšÍŋØÖÆđĶÄÜĄĢ
ANTARIS 4žžĘõÕđÏÖÁËÔÚČΚÎūēĖŽĩÄšÍķŊĖŽĩÄŧ·ūģÏÂĩÄĮŋČÍÐÔÄÜĢŽ°üĀĻÏņūßÓÐĖôÕ―ÐÔĩÄīóģĮĘÐŧ·ūģĄĢÔÚēŧÓ°Ïėĩžš―ŨžČ·ÐÔĩÄĮéŋöÏÂËüÄÜĖáđĐ-158dBÁéÃôķČĄĒÖ§ģÖÏČ―øĩÄWAAS/EGNOSĄĒÁžšÃĩÄŧņČĄÐÔÄÜ(Čį34ÃëĩÄĀäÆôķŊĘąžä)ĄĒÓÅÁžĩÄķāūķŌÖÖÆĄĒ4HzĩÄËĒÐÂÂĘĄĒĩÍđĶšÄĢŽķøĮŌĘđÏĩÍģ·―°ļūßÓÐŨîĩÍĩÄēÄÁÏģÉąūĄĢ
Íž5ĢšANTARIS 4Ö§ģÖĩÄÐŌéÏûÏĒĄĢ
ANTARIS 4šÍA-GPS
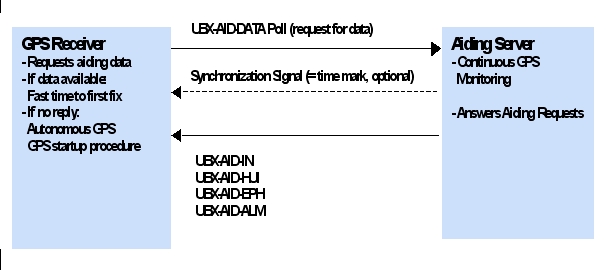
ANTARISÐūÆŽŨéķÔÓÚÐčŌŠÁĒžīĩÄÎŧÖÃķĻÎŧÓĶÓÃĀīËĩĢŽČįÍļđýÐÐķŊĩįŧ°ĩÄE911―ôžąšô―ÐÕßķĻÎŧĢŽŋÉĖáđĐÃŧÓÐĩČīýĩÄŧųÓÚķĻÎŧĩÄ·þÎņŧōÐÐķŊŨĘēúŨ·ŨŲĄĢĀīŨÔÍâēŋŨĘÔīĩÄļĻÖúĘýūÝČįļĻÖú·þÎņÆũÔō―ŦĩÚŌŧīÎķĻÎŧČ·ķĻĘąžäžõÉŲĩ―4ÃëĄĢļĻÖúēÎĘýĖáđĐÐĮĀúĄĒÄęĀúĄĒīÖķĻÎŧĄĒÆĩÂĘÆŊŌÆšÍĘąžäĄĒÎĀÐĮŨīĖŽĢŽŌÔž°ČįđûŋÉÄÜĩÄŧ°ĢŽĖáđĐŌŧļöūŦČ·ĩÄĘąžäÍŽē―ŅķšÅĄĢÕâÖÖļĻÖúĘýūÝĖáđĐÁËGPS―ÓĘÕÆũÓÃÓÚËŅŅ°šÍŨ·ŨŲĩÄđØÓÚÎĀÐĮĩÄĘĩĘąŅķÏĒĢŽŌÔĖáļßTTFFĄĢ
NTARIS 4ĩÄÐŌéūßÓÐĖØĘâÏûÏĒÓÃÓÚA-GPSĀīÓëA-GPS·þÎņÆũ―ŧŧŧļĻÖúĘýūÝĄĢ
ļĻÖúĘýūÝšÍĘąžäÍŽē――ŦĖáļßÐūÆŽŨéĩÄÐÔÄÜ―ŦÄÜĩÃĩ―ĖáļßĢŽČôÃŧÓÐļĻÖúĘýūÝĢŽĀäÆôķŊŌŧ°ãTTFFΊ34ÃëĢŧČôÃŧÓÐĘąžäÍŽē―ĢŽļĻÖúÐÍÆôķŊTTFFΊ15ĩ―20ÃëĢŧķøÔÚĘąžäÍŽē―ÓÅÓÚ8msĮéŋöÏÂĢŽļĻÖúÐÍÆôķŊĩÄTTFFĘąžäŌŧ°ãΊ12ÃëĢŧÔÚĘąžäÍŽē―ÓÅÓÚ400usĮéŋöÏÂĢŽļĻÖúÆôķŊĩÄTTFFĘąžäŌŧ°ãΊ4ÃëĄĢ
ÍŽŅųĢŽÁéÃôķČīÓ-142dBmĖáļßĩ―-145dBmĢŽŌōΊ―ÓĘÕÆũŋÉŌÔÖīÐÐÖØÐÂŧņČĄđýģĖĄĢ
ąūÎÄŨÜ―áĢš
ēÉÓÃA-GPSĢŽÏņLBSšÍE911ÕâŅųĩÄÐÂÓĶÓÃąäĩÃŋÉÐÐĄĢĘđÓÃļĻÖúĘýūÝŋÉŌÔĘĩÏÖÎĒČõŅķšÅĩÄŋėËŲŧņČĄĢŽŋÉŌÔÍÆķŊĩžš――âūö·―°ļĢŽ·ņÔōĩžš―·―°ļ―ŦēŧŋÉÄÜĘĩÏÖĄĢķÔÓÚA-GPSĀīËĩĢŽžžĘõŌŅūĘĮÏÖģÉĩÄĢŽÓĶÓÃĘąŧúŌŅūĀīÁŲĄĢÔÚÐÐķŊÍøÂįķËÓÐÁ―ÖÖŋÉÓÃĩÄ·―·ĻĢšÓÃŧ§ēãÃæÉÏĩÄA-GPSĘĘšÏĩÍģÉąūšÍŋėËŲÕûšÏĢŽŧųÓÚŋØÖÆēãÃæĩÄA-GPSĘĘšÏÓÚĖáđĐŨîžŅĩÄÐÔÄÜĄĢ
ŨũÕßĢšStefan Lux GPSÓĶÓÃđĪģĖĘĶ AtmelđŦËū
--
ÔÎÄÁī―Ó: http://www.eettaiwan.com/ART_8800403798_675327_5a5198b9200601.HTM
|