车载导航系统是ITS系统(智能交通系统)的重要组成部分,它将卫星定位技术(GPS),地理信息系统(GIS)以及现代通信技术融于一身。主要功能是将装有GPS接收机的移动载体的动态位置、时间、状态等信息实时的通过无线网络链接到指挥控制中心,而后在具有强大地理信息处理和查询功能的电子地图上进行载体运动轨迹的显示,并能对载体的准确位置、速度、运动方向、车辆状态等基本信息进行监控和查询。
总体设计方案
系统采用Intel公司Xscal架构的PXA255处理器为核心处理器,操作系统选用嵌入式Linux系统。本系统所包含的功能如下:视频取证功能、卫星防盗功能、无线追踪功能、辅助倒车功能等。
本系统整体功能见图1。其中多功能车载GPS终端分布在各移动的车辆上,负责接收GPS卫星定位信息,通过GPS接收机中的处理器解算出车辆所处的位置坐标。坐标数据经处理后可以显示在本机上,由 CDMA模块,以短信的形式将车辆的位置、状态等信息发送至公网,公网将接收到的车辆定位信息传送至监控中心,在监控中心经过计算机系统的处理后与计算机系统上的GIS电子地图进行匹配,并在地图上动态显示坐标的正确位置。同时,系统可以通过连接在终端上的视频采集设备(USB摄像头)对当前的图像以一定的速率采集并保存成视频信息以供日后事故鉴定之用,也可选择视频实时显示模式,作为辅助倒车之用。此外,截取的关键视频图片还可以通过无线网络传送到监控中心,实现远程无线图像监控。
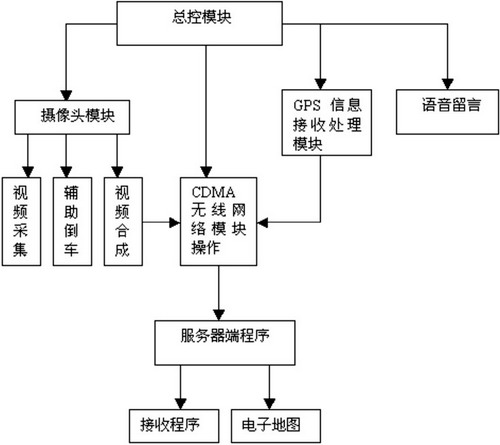
图1系统整体功能模块构成示意图
各主要功能模块设计
本系统车载终端硬件部分主要包括X-Hyper Xscale PXA255B开发板,液晶屏,GPS接收板,USB摄像头、CDMA通信模块等。软件模块主要包括GPS接收模块、语音留言模块、视频取证与辅助倒车模块、无线监控模块,并设计有统一的图形用户界面。
GPS定位模块
GPS接收机采用u-Blox RCB-LC,接收数据采用NMEA0183格式,波特率设为9.6Kbps。GPS模块的工作流程图如图2所示,对GPS数据的读取需要通过对串口的操作来实现。在Linux下,所有的硬件设备都被看成是普通文件,可以通过和普通文件相同的标准系统调用来完成打开、关闭、读取和写入设备等操作。系统中每一个设备都用一种特殊的设备相关文件来表示,存放在/dev/目录下。在Linux中,对每一个设备的描述是通过主设备号和次设备号来实现的。由同一个设备驱动控制的所有设备具有相同的主设备号,主设备号描述控制这个设备的驱动程序,即驱动程序与主设备号是一一对应的;次设备号用来区分同一个驱动程序控制的不同设备。
共3页: 上一页 1 [2] [3] 下一页
|